Software

About Us
Responsible for developing the code that powers our AUV, software is vital to the success of our AUV. Specific focuses of the software subteam in the 2023-2024 season have been vision, movement, localization, navigation, and pinger localization. This includes programming in ROS, using behavior trees, and incorporating machine learning to ensure our sub successfully accomplishes each task.

What We Do
Vision
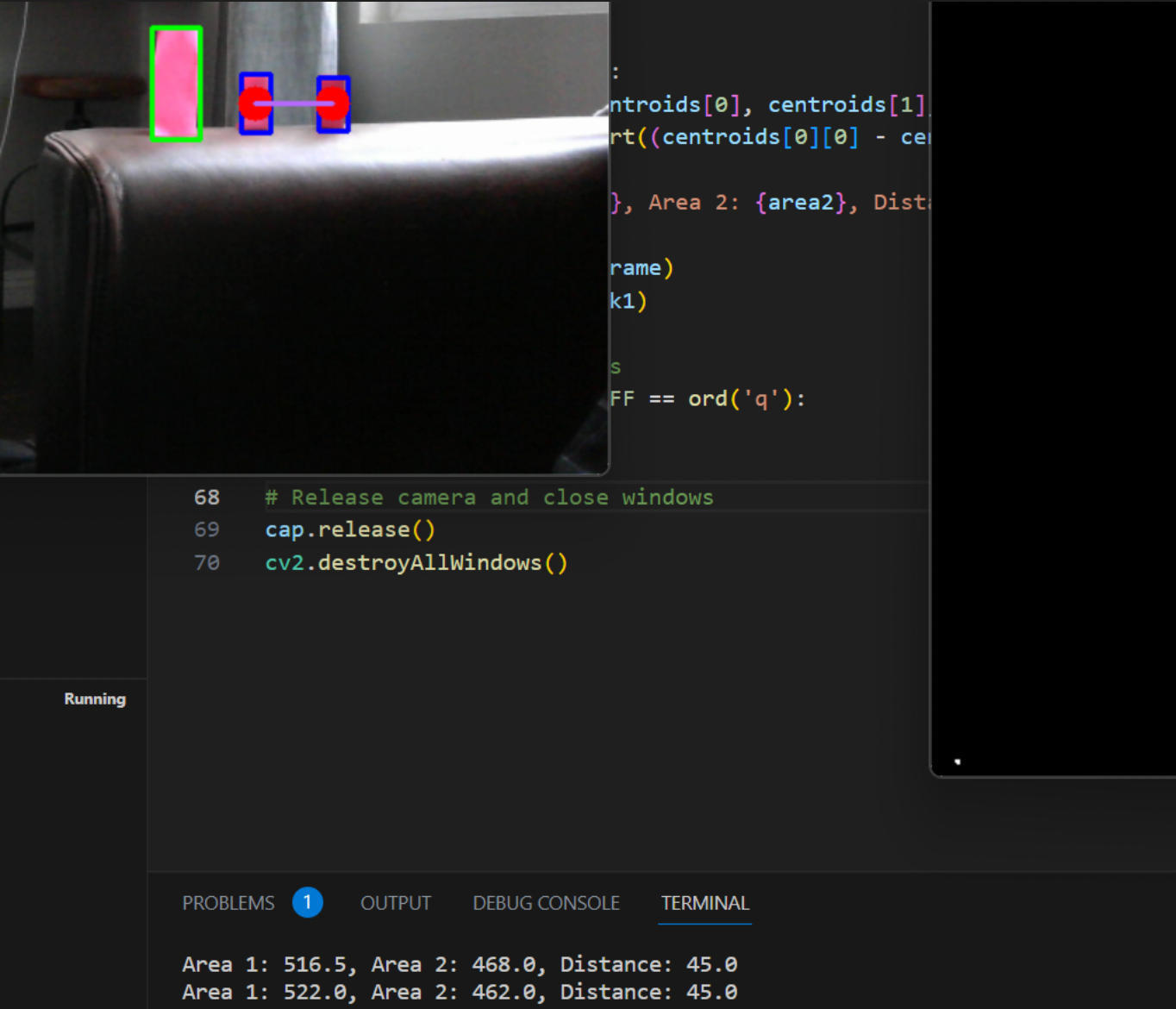
Using YOLO v8, edge extraction, and color filtration, the two cameras located on our sub use localization and recognition to complete tasks and assist in movement.